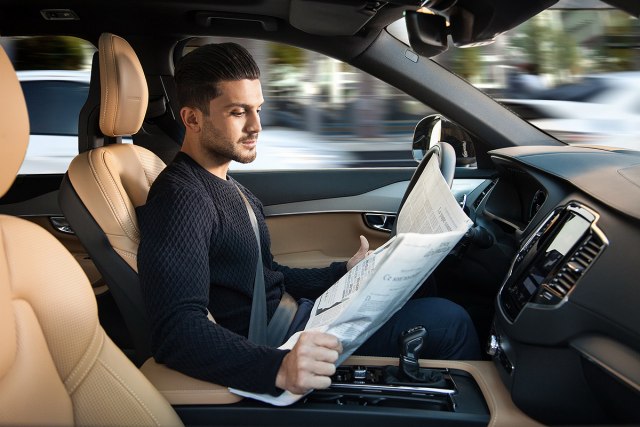
Uprkos svakodnevnim testiranjima samovozećih automobila na javnim saobraćajnicama i miliona pređenih kilometara u realnim uslovima saobraćaja, još smo daleko od trenutka kada će se takva vozila kretati ulicama samostalno, bez intervencije čoveka za upravljačem.
Pred inženjerima i tehničarima je još dosta posla kako bi stvorili bezbedan "auto bez vozača". Jedna od najvećih nepoznanica i izazova za kompjutere koji će u budućnosti upravljati automobilima jesu pešaci i njihovo, ponekad nepredvidivo ponašanje.
Vozači "od krvi i mesa" u stanju su da na osnovu držanja tela i kontakta očima sa pešakom procene da li on namerava da pređe ulicu, ili samo dokono stoji pored kolovoza dok mu misli lutaju ko zna gde.
Takođe, vozač zna da prepozna nameru bicikliste da započne kretanje kada vidi da je ovaj stavio nogu na pedalu, pa može unapred da reaguje.
Kompjuterima na današnjem nivou razvoja veštačke inteligencije teško je da takve probleme rešavaju jer ima previše varijabli.
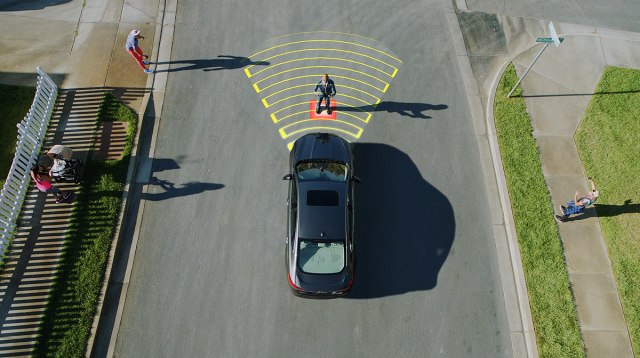
"Jasno je da ne možete da programirate samovozeći automobil da svaki put stane kada primeti pešaka koji se nalazi pored puta, ali takođe morate da obezbedite da se vozilo na vreme zaustavi kada pešak odluči da ipak pređe preko ulice", objašnjava henrik Grin, šef razvojno-istraživačkog odeljenja Volvoa, jednog od brojnih proizvođača automobila koji rade na tehnologiji autonomnih vozila.
Na ovogodišnjem sajmu automobila u Los Anđelesu, Volvo i kompanija Luminar predstavili su naprednu LiDAR tehnologiju koja je u stanju da prepozna pešaka, pa čak i da razazna njegove pojedinačne udove na razdaljinama i do 250 metara.
Međutim, čak i ovako pouzdani sistemi za detekciju ljudskog pokreta nisu u stanju da sa potpunom preciznišću predvide "sledeći korak" u ponašanju pešaka.
Na primer, ako se osoba koja džogira približava kolovozu, nije dovoljno da kompjuter samo predvidi za koje će vreme ona stići do ulice i da li će se njena zamišljena putanja kretanja ukrstiti sa trajektorijom automobila, već je za računar važno i da prepozna da li je ona uočila automobil koji nailazi i da li će zbog toga možda promeniti brzinu trčanja.
Drugi dobar primer u vezi sa problemom predviđanja ponašanja pešaka je osoba koja se nalazi pored kolovoza i gleda u ekran smartfona.
U ovakvim slučajevima postoji velika verovatnoća da dođe do nepredvidivog ponašanja, što najbolje znaju vozači "od krvi i mesa" koji se svakodnevno u saobraćaju suočavaju sa takvim situacijama.
Zbog svega navedenog, timovi koji razvijaju tehnologiju samovozećih automobila pored softverskih i drugih inženjera uključuju i psihologe - stručnjake za ljudsko ponašanje u saobraćaju.
Eksperti za autonomna vozila ističu da kompjuterski sistemi koji kontrolišu vožnju "ne mogu sebi da dozvole luksuz" da ne "pročitaju" tačno ponašanje prešaka.
"U slučaju da sistem nije u stanju da predvidi sledeći potez pešaka, postoje dve opcije, a nijedna od njih nije dobra za dalji razvoj tehnologije samovozećih automobila – ili ćete igrati na kartu potpune bezbednosti i dobiti previše 'oprezna vozila' čije će kretanje biti presporo i nepraktično, ili će se 'vozila bez vozača' kretati brže ali će morati da 'zakoče u mestu' kada to bude neophodno i tako učine vožnju neprijatnom po putnike", objašnjava Pit Render iz kompanije Argo AI.
Ovo je arhivirana verzija originalne stranice. Izvinjavamo se ukoliko, usled tehničkih ograničenja,
stranica i njen sadržaj ne odgovaraju originalnoj verziji.
Podizanje gotovine za kupovinu postaje sve popularnije među potrošačima u Nemačkoj. Ukupni obim gotovinskih plaćanja prošle godine je porastao 20 odsto na 12,31 milijardu evra.
U ukrajinskom napadu na vojni aerodrom na Krimu u sredu ozbiljno su oštećena četiri lansera raketa, tri radarske stanice i druga oprema, saopštila je danas Ukrajinska vojna obaveštajna agencija.
1526 - U bici kod Panipata mogulski vodja Baber je sa 2.000 boraca porazio 10.000 vojnika sultana Ibrahima od Delhija, čime je otpočela dvoipovekovna vladavina Mogula nad Indijom.
Gruzijska predsednica Salome Zurabičvili izjavila je danas da Rusija sprovodi kampanju hibridnog ratovanja sa ciljem da se Gruzija, kako je navela, vrati u orbitu Kremlja i uništi njene nade da će se pridružiti Evropskoj uniji.
Dnevne novine u Srbiji za subotu, 20. april 2024. godine, na naslovnim stranama najavljuju brojne aktuelne društveno-političke teme i donose ekskluzivne priče.
1526 - U bici kod Panipata mogulski vodja Baber je sa 2.000 boraca porazio 10.000 vojnika sultana Ibrahima od Delhija, čime je otpočela dvoipovekovna vladavina Mogula nad Indijom.
Gruzijska predsednica Salome Zurabičvili izjavila je danas da Rusija sprovodi kampanju hibridnog ratovanja sa ciljem da se Gruzija, kako je navela, vrati u orbitu Kremlja i uništi njene nade da će se pridružiti Evropskoj uniji.
Dnevne novine u Srbiji za subotu, 20. april 2024. godine, na naslovnim stranama najavljuju brojne aktuelne društveno-političke teme i donose ekskluzivne priče.
Ptičiji grip koji se širi u Sjedinjenim Državama predstavlja "ogromnu zabrinutost", rekao je u četvrtak glavni naučnik SZO pozivajući na više praćenja i pripreme za virus.
Tim istraživača sa Univerziteta Kalifornije u Riversajdu (UCR) razvio je novu platformu za RNK vakcinu koja bi mogla da štiti od svih sojeva nekog virusa i to sa samo jednom dozom.
U svečanoj sali Starog dvora u Beogradu danas su dodeljene Nagrade grada Beograda - despot Stefan Lazarević, za 2023. godinu, za rad i stvaralaštvo u više kategorija.
Chief Public Prosecutor of the Higher Public Prosecutor's Office in Zajecar cannot confirm media allegations that D.D., suspected of helping his brother to hide the body of the murdered Danka Ilić (2) from Bor, died a violent death.
President of Serbia, Aleksandar Vučić, attended the joint tactical exercise with combat shooting of the Serbian Army "Vihor 2024" at the Temporary Training Range "Pešter".
Ukrainian Air Force Commander Mykola Oleshchuk said that Ukraine shot down a Russian Tu-22M3 long-range strategic bomber last night. The GRU also released a video of the air defense shooting down Russian aircraft.
Director of the US Central Intelligence Agency (CIA), William Burns, said that without US military assistance, Ukraine could experience significant failures in the war with Russia.
Netflix je saopštio da više neće objavljivati brojeve pretplatnika i koliko novca zarađuje "po čoveku", počevši od izveštaja o zaradi za prvi kvartal 2025.
Kompanija Stellantis objavila je pobednike ovogodišnjeg "Drive for Design" takmičenja, gde su srednjoškolci dizajnirali "automobil iz snova za bilo koji Stellantisov brend 2040. godine".
Sve je češći slučaj da proizvođači automobila u Kini prave i svoje mobilne telefone - prošle godine je to uradio Nio, uskoro će Polestar, a na red je došao još jedan brend.
Pevačica je otkrila da joj je bilo "previše udobno" u pidžami i trenerkama pošto je prošle godine dobila drugog sina, ali i da posle porođaja, moda postaje "najmanje važna".




















































Komentari 14
Pogledaj komentare